Variable frequency drive Sensorless Control
The variable frequency drive configurations of the sensorless control contain the following additional functions, which supplement the behavior according to the parameterized V/f characteristic.
Slip compensation
The load-dependent difference between the reference speed and the actual speed of the 3-phase motor is referred to as the slip. This dependency can be compensated by the current measurement in the output phases of the variable frequency drive.
The activation of Operation Mode for the slip compensation enables as speed control without feedback. The stator frequency and speed are corrected depending on the VFD load.
The variable frequency drive slip compensation is activated during the guided commissioning. The Stator Resistance is required to ensure a correct function and is measured during the guided commissioning.
If no guided commissioning is executed, the slip compensation can be activated manually. In these cases, enter the VFD value for the Stator Resistance manually according to the motor data sheet.
The variable frequency drive control behavior of the slip compensation can only be optimized via the parameters in the case of specific applications. The VFD parameter Amplification determines the correction of the speed and the effect of the slip compensation proportionally to the change of load. Parameter Max. Slip Ramp defines the maximum frequency change per second in order to avoid an overload in the case of a load change.
The VFD parameter Frequency Lower Limit determines the frequency as from which the slip compensation becomes active.
Current limit value controller
Via a load-dependent speed control, the current limit value controller ensures that the VFD system is not overloaded. This is extended by the intelligent current limits described in the previous chapter. The current limit value controller reduces the load on the VFD, e.g. during acceleration, by stopping the acceleration ramp. The switch-off of the variable frequency drive which happens when the acceleration ramps have been set at an excessive gradient is thus prevented.
The variable frequency drive control behavior of the current limit controller can be set via the proportional part, parameter Amplification and the integrating part, parameter Integral Time. If, in exceptional cases, optimization of the controller parameters is required, proceed with the following steps:
Behavior in motor operation:
If the VFD current set via parameter Current Limit is exceeded, the activated current limit value controller will reduce the output frequency until the current limit is no longer exceeded. The output frequency is reduced as a maximum to the frequency set by the parameter Frequency Limit. If the current value drops below the variable frequency drive Current Limit, the output frequency is raised back to the reference value.
Behavior in generator operation:
If the VFD current set via parameter Current Limit is exceeded, the activated current limit value controller will increase the VFD output frequency until the current limit is no longer exceeded. The output frequency is increased, as a maximum, to the set Maximum Frequency. If the current is below the variable frequency drive Current Limit, the output frequency is reduced to the required reference value again.
Slip compensation
The load-dependent difference between the reference speed and the actual speed of the 3-phase motor is referred to as the slip. This dependency can be compensated by the current measurement in the output phases of the variable frequency drive.
The activation of Operation Mode for the slip compensation enables as speed control without feedback. The stator frequency and speed are corrected depending on the VFD load.
The variable frequency drive slip compensation is activated during the guided commissioning. The Stator Resistance is required to ensure a correct function and is measured during the guided commissioning.
If no guided commissioning is executed, the slip compensation can be activated manually. In these cases, enter the VFD value for the Stator Resistance manually according to the motor data sheet.
The variable frequency drive control behavior of the slip compensation can only be optimized via the parameters in the case of specific applications. The VFD parameter Amplification determines the correction of the speed and the effect of the slip compensation proportionally to the change of load. Parameter Max. Slip Ramp defines the maximum frequency change per second in order to avoid an overload in the case of a load change.
The VFD parameter Frequency Lower Limit determines the frequency as from which the slip compensation becomes active.
Current limit value controller
Via a load-dependent speed control, the current limit value controller ensures that the VFD system is not overloaded. This is extended by the intelligent current limits described in the previous chapter. The current limit value controller reduces the load on the VFD, e.g. during acceleration, by stopping the acceleration ramp. The switch-off of the variable frequency drive which happens when the acceleration ramps have been set at an excessive gradient is thus prevented.
The variable frequency drive control behavior of the current limit controller can be set via the proportional part, parameter Amplification and the integrating part, parameter Integral Time. If, in exceptional cases, optimization of the controller parameters is required, proceed with the following steps:
- Change parameter Current Limit with a big step, analyze the changes in the Scope.
- For a more dynamic behavior increase Amplification and/or decrease Integral Time.
- For a less dynamic behavior decrease Amplification and/or increase Integral Time.
Behavior in motor operation:
If the VFD current set via parameter Current Limit is exceeded, the activated current limit value controller will reduce the output frequency until the current limit is no longer exceeded. The output frequency is reduced as a maximum to the frequency set by the parameter Frequency Limit. If the current value drops below the variable frequency drive Current Limit, the output frequency is raised back to the reference value.
Behavior in generator operation:
If the VFD current set via parameter Current Limit is exceeded, the activated current limit value controller will increase the VFD output frequency until the current limit is no longer exceeded. The output frequency is increased, as a maximum, to the set Maximum Frequency. If the current is below the variable frequency drive Current Limit, the output frequency is reduced to the required reference value again.
Post a Comment:
You may also like:
Featured Articles
What is VFD, How it works? - VFD ...
 VFD is shorted for Variable Frequency Drive (also known as AC Drives and Inverters) -- that's used to make an AC motor working in ...
VFD is shorted for Variable Frequency Drive (also known as AC Drives and Inverters) -- that's used to make an AC motor working in ...
VFD is shorted for Variable Frequency Drive (also known as AC Drives and Inverters) -- that's used to make an AC motor working in ...VFD: Insulated Gate Bipolar Transistor ...
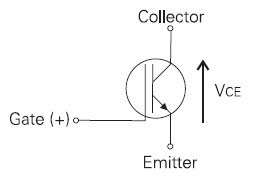 IGBT (insulated gate bipolar transistor) provides a high switching speed necessary for PWM VFD operation. IGBTs are capable of ...
IGBT (insulated gate bipolar transistor) provides a high switching speed necessary for PWM VFD operation. IGBTs are capable of ...
IGBT (insulated gate bipolar transistor) provides a high switching speed necessary for PWM VFD operation. IGBTs are capable of ...Three phase inverters
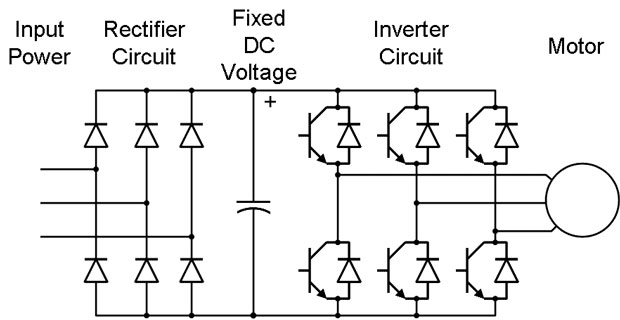
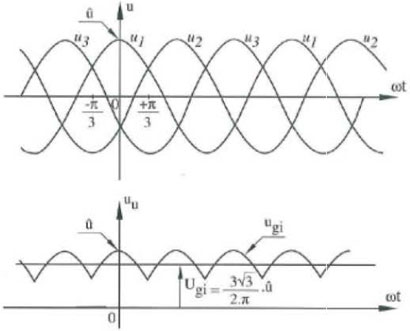
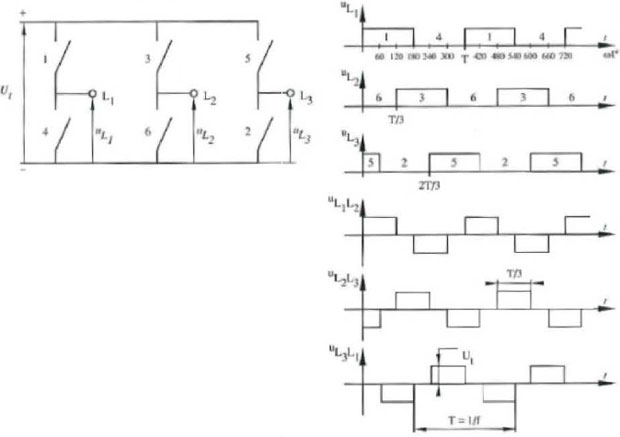 In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...
In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...
In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...Variable Frequency Drive Harmonics and ...
A discussion of the benefits of variable frequency drives often leads to a question regarding electrical harmonic distortion ...
Variable frequency drive Rectifier
 To understand variable frequency drive (VFD) better, it's necessary to explain some of the main parts of the variable frequency ...
To understand variable frequency drive (VFD) better, it's necessary to explain some of the main parts of the variable frequency ...
To understand variable frequency drive (VFD) better, it's necessary to explain some of the main parts of the variable frequency ...
VFD manufacturers