Ideal condition would be to have 2 motors coupled together. AC or DC load motor does not matter. DC motor is easier to control the load, AC motor not much different just be aware of the DC bus voltage will increase until the variable frequency drive faults on overvoltage or a catastrophic component failure (usually IGBT). If 2 motors are not available one needs to use what is at hand. A locked motor rotor will work provided it is only for a quick test in the V/Hz mode. Do not try in Sensorless Vector or Closed Loop. In this method one probably will not attain the full load current. Removing the rotor from the motor is too much work. In this method only the magnetizing current to flow through the stator windings. This can also be accomplished by running the motor with no load. If the IGBT is going to fail the usual mode of failure is on voltage not on current.
It depends a great deal on how the motor is started, direct on line, through a reduced voltage starter / soft start or with a variable frequency drive. Also, the application demands can play heavily into the stress on a motor. If you can put even a modest ramp into a VFD drive, motor life can be vastly greater, even with frequent starting. It all comes down to inrush current.
Bearing failure is caused by electrostatic discharge arcing. It is difficult to predict if this will happen, and it's generally a problem only in larger motors, but that's not a guarantee it won't happen in smaller ones. Typically you won't know you have a problem until it causes a bearing failure.
A dV/dT filter smooths the VFD outputs waveform greatly because the primary component in the filter is an inductor. The filter might be a bit noisy, but the motor will be quieter. Because a dV/dT filter or a sine-wave filter are LRC (inductive-resistive-capacitive) circuits, the VFD carrier frequency needs to be fixed at a point or span that will not cause resonance in the filter circuit.
Assuming it's a voltage-source PWM type inverter, run the variable frequency drive without any load at all and look at the VFD output voltage waveform across each of the three phases with a properly rated oscilloscope. If that looks OK, hook up an unloaded motor and run that, again checking the VFD output waveform with a scope. Check the VFD current balance on all three phases. If it looks good and sounds good, it most probably is good. THEN verify that all the VFD inputs and outputs do what they're supposed to.
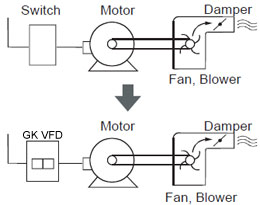
The various types of industrial motors that can be used with variable frequency drives are:
- Dc motor: dc motors are still in production although the number of active manufacturers has decreased considerably, specifically those that are still manufacturing large dc motors (> 1 MW).
- Ac asynchronous squirrel cage motor: This type of motor is the most commonly used motor in industrial processes with variable frequency drives.
- Ac asynchronous wound rotor motor: This type of motor was traditionally used in variable frequency drive when the load required a high starting torque and the strength of the power supply network was insufficient to permit Direct On-Line (DOL) starting. Variable speed operation is obtained by varying the effective resistance in the rotor circuit.
- Ac synchronous motor with brushless ac or brushed excitation.
- Ac synchronous motor with permanent magnet excitation: This type of motor is specifically designed for operation with a variable frequency drive. Synchronous motors are used mainly in the high power ranges to minimize costs by minimizing the current rating of the variable frequency drive and due to the non availability of squirrel cage induction motors.
The output waveform as seen on an oscilloscope does not look very sinusoidal when it come to the voltage. If one looks directly at the motor current you will see a sinusoidal waveform. What happens in the variable frequency drive (VFD) processor it runs an algorithm to approximate the voltage and the torque regulator controls the motor current directly. As for improving the waveform produced by the VFD the best way is to use some type of filter on the output. It could a simple line 3 phase line reactor (3%) similar to the input line reactor. One could design an LC type filter to put on the VFD output. If you chose to design the LC filter be sure to take in account the modulation frequency of the IGBT. Modulation frequency could be between 2 kHz to 16 kHz.
The frequency of the distribution system is fixed. When applied to the stator of the motor, it induces a rotating magnetic field in the motor that spins at synchronous speed defined by the equation S=120F/P where F is synchronous speed in RPM, F the applied frequency in Hertz and P the number of poles, always a multiple of 2. For a two-pole motor operating at 50Hz, the synchronous speed is 3000 RPM.
The rotor of the induction motor is affected by this rotating magnetic field, and a current is induced in the rotor as long as there is a speed difference between the rotor and the field (lines of magnetic flux cutting through a conductor that makes a closed circuit). The induced current produces a magnetic field of its own, and the two fields interact to produce torque on the rotor, inducing it to spin. What happens if you overdrive the motor? The rotor is still spinning inside a rotating magnetic field, it's just doing it FASTER than that field. Current is still induced in the rotor, that current produces a magnetic field, and the fields still interact, but this time the torque produced is NEGATIVE, or in the opposite direction of the rotation of the shaft. It doesn't affect the utility frequency any more than rotor slip below synchronous speed would.
The rotor of the induction motor is affected by this rotating magnetic field, and a current is induced in the rotor as long as there is a speed difference between the rotor and the field (lines of magnetic flux cutting through a conductor that makes a closed circuit). The induced current produces a magnetic field of its own, and the two fields interact to produce torque on the rotor, inducing it to spin. What happens if you overdrive the motor? The rotor is still spinning inside a rotating magnetic field, it's just doing it FASTER than that field. Current is still induced in the rotor, that current produces a magnetic field, and the fields still interact, but this time the torque produced is NEGATIVE, or in the opposite direction of the rotation of the shaft. It doesn't affect the utility frequency any more than rotor slip below synchronous speed would.
1. Compare the torque characteristics of constant, variable & shock loads.
2. Explain the function of reactors that are connected in series with the line & load side of a variable frequency drive.
3. List the factors that need to be taken into account in selecting the location for a VFD.
4. What is the purpose of a variable frequency drive enclosure?
5. What is the function of a VFD's operator interface?
6. How are the effects of electromagnetic interference minimized in a variable frequency drive installation?
7. In addition to line losses, why must cable lengths between a PWM VFD & motor be kept to a minimum?
8. Why is proper grounding required for the safe & reliable operation of a variable frequency drive system?
9. A bypass contactor working in conjunction with an isolation contactor is utilized in certain variable frequency drive installations. What purpose is served by this combination of contactors & how do they work together to achieve this?
2. Explain the function of reactors that are connected in series with the line & load side of a variable frequency drive.
3. List the factors that need to be taken into account in selecting the location for a VFD.
4. What is the purpose of a variable frequency drive enclosure?
5. What is the function of a VFD's operator interface?
6. How are the effects of electromagnetic interference minimized in a variable frequency drive installation?
7. In addition to line losses, why must cable lengths between a PWM VFD & motor be kept to a minimum?
8. Why is proper grounding required for the safe & reliable operation of a variable frequency drive system?
9. A bypass contactor working in conjunction with an isolation contactor is utilized in certain variable frequency drive installations. What purpose is served by this combination of contactors & how do they work together to achieve this?
In method one the rating of the motor is the same, but in method two the load motor is bigger than the test motor, how can I calculate the rating of the load and test motor? If for example I have tested motor 11 KW, what is the rating of the load motor?
In answer to "one- or two-VFD solution", I have to say: What is it you are trying to accomplish? If all you want to do is load your VFD/motor combination to 100% (or higher), the single VFD solution will cost you the least in materials and will allow you to achieve your goal. If you need to load the motor/VFD combination over a wide speed range, you need two VFDs. If you can get an identical motor and drive, and the drive manufacturer OK's the common-bus solution proposed above would be the least-cost option for that scenario.
In answer to "one- or two-VFD solution", I have to say: What is it you are trying to accomplish? If all you want to do is load your VFD/motor combination to 100% (or higher), the single VFD solution will cost you the least in materials and will allow you to achieve your goal. If you need to load the motor/VFD combination over a wide speed range, you need two VFDs. If you can get an identical motor and drive, and the drive manufacturer OK's the common-bus solution proposed above would be the least-cost option for that scenario.
If I connect brake resistor to the VFD to absorb the regenerative energy, I can to run the motor driven by VFD below the line frequency. On another way, what about if I connect both motors on VFDs (each motor driven by separate VFD) can I turn the driven motor on any frequency I need?
Yes, you can, however check the wattage ratings for dynamic braking resistors - they are far below the full power rating of the variable frequency drive.
Yes, you can, however check the wattage ratings for dynamic braking resistors - they are far below the full power rating of the variable frequency drive.
There are two types of reactors used with VFDs: load reactors (or DC bus chokes) and AC line reactors.
The goals of these reactors are to reduce the harmonic content of the input current (improve distortion power factor) and to reduce the conducted EMC noise on the supply.
Some VFDs have either of these reactors built in as standard, and others don't . The variable frequency drives that don't include the reactors are smaller and cheaper, but may require them to be mounted separately in order to comply with CE or similar EMI/EMC regulations.
The goals of these reactors are to reduce the harmonic content of the input current (improve distortion power factor) and to reduce the conducted EMC noise on the supply.
Some VFDs have either of these reactors built in as standard, and others don't . The variable frequency drives that don't include the reactors are smaller and cheaper, but may require them to be mounted separately in order to comply with CE or similar EMI/EMC regulations.
Featured Articles
Non-Enclosure Variable Frequency Drive ...
 No enclosure (cover), reducing installation space and cost effective. Widely used in All-In-One control cabinet. Keep the same ...
No enclosure (cover), reducing installation space and cost effective. Widely used in All-In-One control cabinet. Keep the same ...
No enclosure (cover), reducing installation space and cost effective. Widely used in All-In-One control cabinet. Keep the same ...Variable frequency drive application ...
 Variable Frequency Drive (VFD) can be used in lots of fields. Variable frequency drives are widely used to control the speed of ...
Variable Frequency Drive (VFD) can be used in lots of fields. Variable frequency drives are widely used to control the speed of ...
Variable Frequency Drive (VFD) can be used in lots of fields. Variable frequency drives are widely used to control the speed of ...Variable frequency drive in HVAC ...
 Variable frequency drives (VFD) have been used for HVAC systems in buildings for more than 40 years. But only in recent years, ...
Variable frequency drives (VFD) have been used for HVAC systems in buildings for more than 40 years. But only in recent years, ...
Variable frequency drives (VFD) have been used for HVAC systems in buildings for more than 40 years. But only in recent years, ...Variable Frequency Drive Harmonics and ...
A discussion of the benefits of variable frequency drives often leads to a question regarding electrical harmonic distortion ...
Three phase inverters
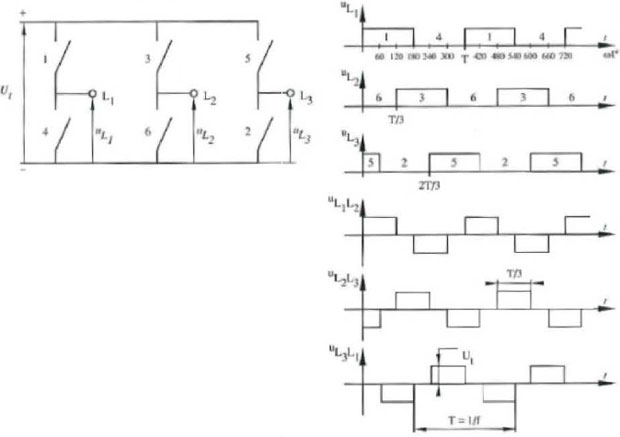 In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...
In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...
In the variable frequency drive rectifier paper, it explains how to go from three phase alternating current voltage to a direct ...
VFD manufacturers